
当空间智能与具身智能的双螺旋开始转动,AI行业正迎来虚拟世界与物理世界交互的临界点:OpenAI押注人形机器人、英伟达发布Project GR00T、特斯拉擎天柱工厂落地,全球科技巨头已悄然开启具身智能之间的竞赛;而空间计算赛道更涌现出超过20家估值超10亿美元的独角兽,苹果Vision Pro的推出标志着三维交互范式的全面革新。具备“环境感知-空间建模-具身执行“全栈能力的新一代智能体,正在突破传统AI的虚拟边界,构建起物理世界的感知-决策闭环。这场由空间认知与实体交互共同驱动的智能革命,或将重新定义人机协作的底层逻辑。


4月16日,在利亚德2025年生态合作伙伴大会上,利亚德集团副总裁兼CMO、虚拟动点董事长兼CEO刘耀东展开了一场关于空间计算、具身智能的深度分享。从虚拟动点能力矩阵、到大模型的进化、再到具身AI的落地实践,系统阐述了虚拟动点在算法、硬件、数据三大核心能力的积累,并结合具体案例与行业趋势,展现了技术落地与生态协同的实践路径。
“三大核心能力”构筑技术底座
刘耀东指出,得益于对空间计算技术的长期深耕,虚拟动点已沉淀出三大核心能力:以空间计算算法与AI动作大模型为核心的算法技术能力、以空间定位设备为代表的硬件能力,以及多年积累的海量、优质且持续产出的动作数据资产。其中,算法层面的突破尤为关键。他介绍,虚拟动点拥有三项全球领先技术:以精准著称的OptiTrack光学定位技术、LydCap无标记点识别技术,以及基于大模型的LYDIA动作生成系统。

在技术迭代层面,虚拟动点的硬件设备持续升级。刘耀东以OptiTrack Versa系列为例,强调其防护等级达到IP66,防水防尘性能显著提升,使得数据采集突破室内场景限制,拓展至户外与复杂环境,大幅提高了对空间数据的获取效率与质量。与此同时,无标记点识别技术的优化也取得显著进展,通过算法迭代实现了更广的视野覆盖与更高的数据精度。刘耀东展示的演示视频中,系统可精准捕捉多人的人体动作细节,甚至在复杂光照条件下仍能保持稳定表现。
面对行业对技术路线的讨论,刘耀东坦言,虚拟动点在光学、惯性、光惯融合等技术路径上均有储备,但更聚焦于光学与AI的结合。他指出:“光学技术的稳定性和数据质量无可替代,抗遮挡问题通过AI算法已逐步解决。”
今年3月,在旧金山GDC全球游戏开发者大会上,虚拟动点推出了“光学与无标记融合技术”。该技术在全球游戏开发者大会上首次亮相,虚拟动点通过同一套设备完成了光学与无标记的技术融合,光学标记的高精度与无标记的便捷性合二为一,实现了数据质量一致性,显著降低穿戴设备的负担,为游戏、机器人等领域的应用提供了全新可能。
在算法层面,虚拟动点的动作大模型LYDIA持续进化。2023年12月发布的LYDIA 1.0在全球范围内率先开启AIGC新模式,而2024年推出的LYDIA 2.0版本参数量提升至200亿,并接入DeepSeek大语言模型,通过语言模型能力的接入,LYDIA对文字描述的动作意图理解能力得到进一步提升。刘耀东强调,LYDIA 2.0的显著进步在于“动作生成与环境交互能力”。例如,在模型中可自主规划虚拟角色在复杂场景中的路径,并进行指定目标的交互。现场演示中,模型能够走到沙发处坐下,抓取桌子上的水杯。这一能力不仅为影视、游戏行业提供高效工具,更在机器人领域开辟了新的应用场景。
在他看来,这种长期积累出来的数据资产,是空间智能真正能转化为产品和服务的基础。刘耀东透露,公司已构建包含原子级动作、复杂连贯动作及套路化动作的数据库,并与中文词典精准匹配,实现“一个动作可对应多种中文描述”。这一设计极大提升了数据调用效率,为合作伙伴提供标准化接口。例如,游戏开发者只需输入“跳跃”或“舞蹈”等关键词,即可快速获取对应动作数据,显著降低开发成本。
虚拟动点空间计算赋能下,各产业化格局正在被重新构建。据刘耀东介绍,在去年的现象级国产游戏《黑神话:悟空》中,全部角色的动作捕捉均由虚拟动点提供技术支持。在影视领域,虚拟动点参与了《封神》《三体》《流浪地球》等多个大型项目。
谈及未来规划,刘耀东表示,虚拟动点将一方面继续深耕技术和数据,另一方面加强与行业伙伴的连接。
“我们不能只做科研。”他强调,虚拟动点的目标是在坚持自主研发的同时,也要服务好客户、理解行业需求。“只有这样,技术才有用武之地。”
从技术到产品,再到行业融合,刘耀东强调的始终是稳扎稳打。“拥有了(算法、数据、硬件)这三件事,我们就能决定自己怎么走。”
动作大模型与具身智能:让AI真正“站起来”
随着AI逐渐具身化,从云端推理走向现实交互,刘耀东将其比作“人工智能真正站了起来的一刻”。他提到:“2023年底我们推出了第一代动作大模型,在那波全球热潮中,我们是极少数提前完成核心技术封装的企业之一。”
这正是“具身智能”在当下最重要的边界突破,即AI不仅拥有语音理解和情境推理能力,更具备了环境感知能力。虚拟动点的动作大模型目前已经可以与虚拟世界中的物体进行交互,实现路径规划与目标行为控制,迈出了从单一指令执行向多轮交互决策的关键一步。
“我们不只是生成动作,而是在控制动作。”刘耀东解释说,在新的动作模型中,AI不仅能走路,还能识别场景并作出合适反应。“我们甚至实现了虚拟角色与环境的动态交互,这是游戏、影视、甚至机器人行业里最接近人类行为模拟的技术之一。”
刘耀东将虚拟动点在机器人领域的定位定义为“赋能者”:“我们不做机器人本体,但要做机器人的眼睛和大脑。”这一战略选择源于其对人形机器人行业痛点的洞察——机器人厂商普遍面临数据稀缺、算法复杂、末端控制不足的挑战。
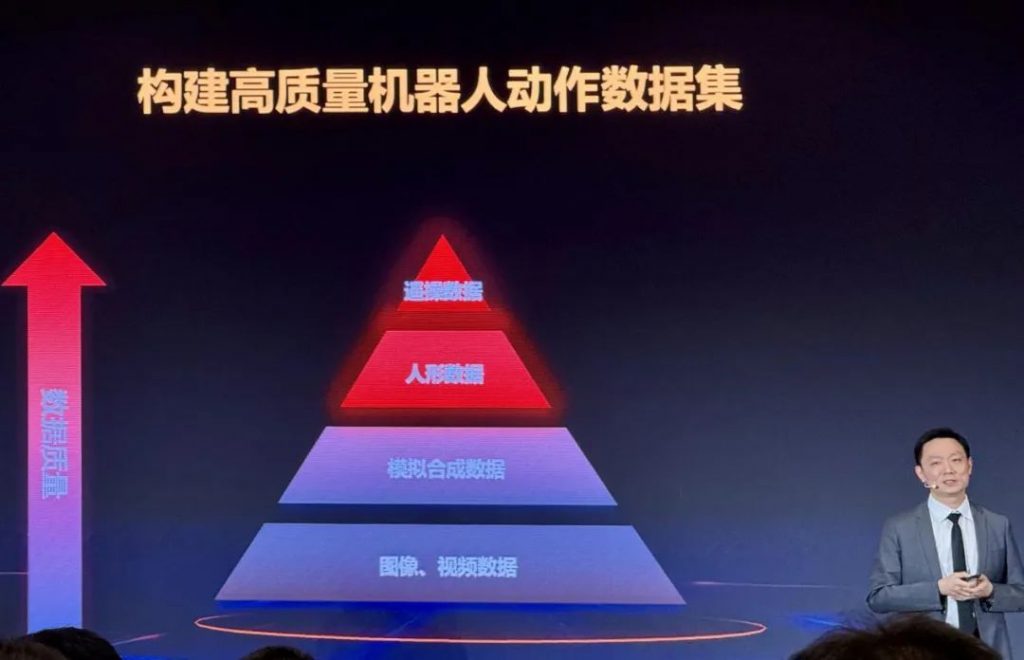
虚拟动点为机器人产业提供的四大能力,形成完整的赋能体系:首先是数据能力,虚拟动点不仅拥有海量人形动作数据,更构建了高质量机器人动作数据集。刘耀东直言,当前行业面临“数据规模与质量难以兼得”的痛点,而虚拟动点通过“金字塔尖数据”(真人动作数据与机器人实测数据)的积累,解决了这一难题。其次,算法能力的持续迭代为机器人提供“决策大脑”。通过LYDIA大模型与空间计算算法的融合,虚拟动点可为机器人生成复杂动作序列,并实现实时环境交互。刘耀东展示的案例中,机器人在模仿技术人员动作时,不仅复现了走、跑、挥手等基础动作,还能在负重状态下保持平衡,甚至完成舞蹈表演。
服务层面,虚拟动点提供端到端解决方案,涵盖数据采集、精修、训练及部署。刘耀东强调:“我们希望合作伙伴少做一点,我们多做一点。”例如,针对机器人末端执行器的毫米级数据采集需求,虚拟动点推出小型化传感器方案,帮助机器人精准完成抓取、操作等精细动作。
硬件能力方面,虚拟动点自主研发的空间定位设备,解决了行业普遍存在的兼容性与稳定性问题。刘耀东特别提到,虚拟动点通过微型传感器模块可嵌入机器人末端,实现毫米级空间定位,显著提升机器人在复杂环境中的操作精度。例如,在工业场景中,机器人可精准完成螺丝装配;在服务场景中,可完成递送、清洁等任务。
“大家都知道,很多机器人跳得了舞,却拿不起面前那瓶水。”刘耀东表示,“精细数据是最稀缺的”,为此,通过一系列小型传感器模组,搭配光学与无标记系统,虚拟动点得以帮助机器人合作伙伴完成末端细节的精准控制。
他特别强调虚拟动点在“机器人数据三角”中的地位:一是原型人类数据,二是虚拟仿真合成数据,三是机器人遥操作数据。其中最具价值的——机器人遥操数据,正是虚拟动点最擅长的部分。

据悉,自2024年12月,虚拟动点与松延动力成立“具身智能联合实验室”后,仅过去3个月,松延动力的机器人其动作数据集经过多轮训练优化,实现了动作流畅性与稳定性兼顾,已从最初的蹒跚学步,发展到如今能够完成跳舞、连续空翻等高难度动作。
现场,刘耀东还展示了与多家企业的合作案例:从工业机械臂到人形机器人,从四足机器人到双足机器人,虚拟动点的技术和服务已适配多种形态。在4月北京机器人马拉松比赛中,其赋能的机器人在复杂路面测试中表现优异,步伐稳定性达到行业领先水平。
AI玩具:一场关于“现实感”的新试验
会上,虚拟动点还发布了全球首款交互式潮玩产品——Mini AI全息玩具,打造AI+生态。Mini AI全息玩具融合了利亚德集团及虚拟动点全球领先的智慧显示技术、AI和空间计算技术、交互式动作内容生产能力,是行业内唯一不惧反射眩光产品,同时接入DeepSeek、豆包、ChatGPT等能力,支持AI交互对话、多语言交互等,为精神消费时代的到来,开辟AI+硬件的落地应用。

刘耀东指出,聚焦“AI玩具”这一创新业务,将其视为虚拟动点向C端市场延伸的重要布局。他指出:“AI潮玩不仅是消费品,更是空间计算与AI技术的大众化载体。”
他表示,AI真正的价值,是对C端用户形成直接连接,“AI是需要更多改造的,让它对C端的控制是直接的。”他强调,虚拟动点的切入点不在于构建故事或表面效果,而在于整合技术能力,“我们集团的优势是光学显示技术,我们不是去找一个娃娃的故事,而是想办法把我们在光学上的优势、空间计算的能力和AI交互整合起来。”
写在最后
刘耀东的发言勾勒出一幅技术赋能产业的蓝图:空间计算与具身智能不仅是技术突破,更是重构商业价值的引擎。从动作捕捉到机器人运动控制,从数据资产到生态共建,虚拟动点正以扎实的技术积累与开放的合作姿态,推动AI与传统产业的深度融合。在空间计算与具身智能的时代浪潮中,虚拟动点的每一步技术迭代,都在为人类与机器的协作书写新的可能。
原创文章,作者:志斌,如若转载,请注明出处:http://damoai.com.cn/archives/10036